|
發(fā)布時(shí)間: 2019-6-28 10:40
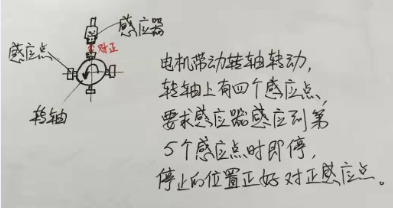
正文摘要:實(shí)際工作時(shí),感應(yīng)器與感應(yīng)點(diǎn)停止的位置時(shí)而對(duì)正,時(shí)而錯(cuò)位,請(qǐng)教有什么辦法解決這個(gè)問(wèn)題?(用的是變頻器控制) |
| 凸輪分割器 |
| 旋轉(zhuǎn)編碼器加制動(dòng)電機(jī)會(huì)不會(huì)好點(diǎn)? |
| 樓主目前選擇的是什么電機(jī)?如果伺服電機(jī)就很簡(jiǎn)單,如果不是伺服,選個(gè)帶抱閘器的電機(jī),但是精度2度的話(huà),我覺(jué)得選擇伺服電機(jī)做個(gè)雙閉環(huán)。可以加我微信詳細(xì)了解下,我?guī)湍阕鰝€(gè)方案17317679548 |
| 感應(yīng)片加寬,程序里面控制提前減速到位即停止 |
|
換電機(jī)! |
美人魚(yú)_t7m38 發(fā)表于 2019-6-29 11:12 只好換方法了 |
702736 發(fā)表于 2019-6-28 14:54 還真的是1450R/MIN,精度2度內(nèi) |
| 你這個(gè)要PID閉環(huán)控制吧,機(jī)構(gòu)肯定會(huì)存在轉(zhuǎn)動(dòng)慣量,如果轉(zhuǎn)速高的話(huà)很難做到隨點(diǎn)隨停,這就需要在系統(tǒng)里提前設(shè)定好角度值,外加一些傳感器對(duì)角度及速度進(jìn)行監(jiān)測(cè),讓變頻器內(nèi)部進(jìn)行精確運(yùn)算及控制 |
本帖最后由 702736 于 2019-6-28 14:56 編輯 美人魚(yú)_t7m38 發(fā)表于 2019-6-28 14:24 每分鐘1圈,精度20度那就很簡(jiǎn)單;每分鐘1450圈,精度2度那就別想了,所以要告知參數(shù)啊 |
Archiver|手機(jī)版|小黑屋|機(jī)械社區(qū) ( 京ICP備10217105號(hào)-1,京ICP證050210號(hào),浙公網(wǎng)安備33038202004372號(hào) )
GMT+8, 2025-7-19 16:02 , Processed in 0.079295 second(s), 22 queries , Gzip On.
Powered by Discuz! X3.5 Licensed
© 2001-2025 Discuz! Team.