|
發布時間: 2017-6-22 00:30
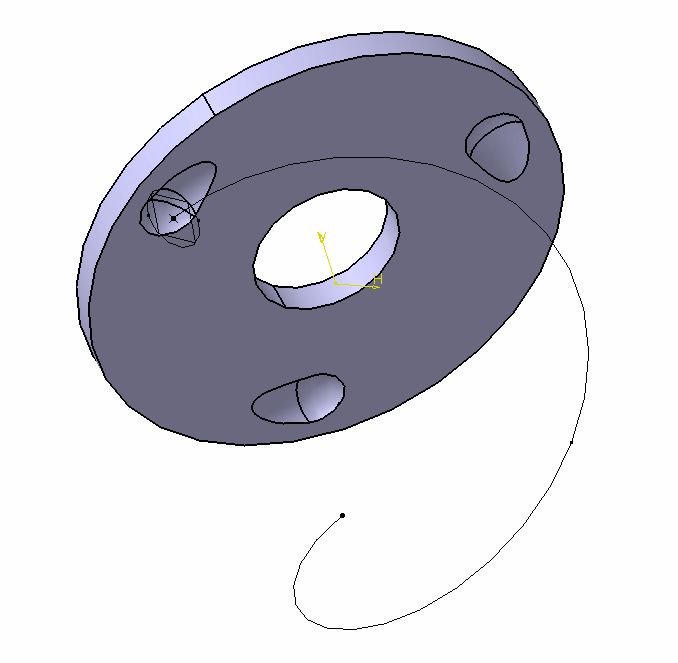
正文摘要:本帖最后由 止疼劑 于 2017-6-22 00:37 編輯 2 a V. K' R3 k! ^ P3 i# V8 c& W `. j* f8 Z: N 如圖所示的螺旋槽,在其它三維建模工具中畫好再導入adams進行仿真。& s+ o8 p3 s4 ... |
止疼劑 發表于 2017-6-27 23:20 潘博士所說的應該是二次開發,可以通過編制用戶子程序來滿足用戶的某些特定要求$ P5 f, O& x; G, R- N$ J! Q |
pengjc2001 發表于 2017-6-27 15:49: v+ e8 }% i) Y+ ~6 @4 Q 這幾天找資料,在# g# V. Z& t$ ^' c n http://www.mscsoftware.com/zh-hans/case-studies?field_noderef_applications_nid=All&field_noderef_industries_nid=All&field_noderef_products_nid=24/ [6 Z- e/ R( n. d 看到一篇案例《中國大學為核電站救援行動開發有腿機器人》,文檔第2頁有一段話) Y1 x, B3 \. d. y* e/ |7 x 潘博士采用SolidWorks 計算機輔助設計(CAD)軟件開發了針對機器人設計方案的幾何體,并編寫了Adams/View 命令語言腳本,將幾何體轉換成Adams 模型,例如添加關節、軸承及電機。潘博士表示:“Adams/View 命令語言在機器人參數化建模方面表現良好,這是因為我可以通過編程創建單個文件來生成機器人設計,然后只需更改命令語言文件中的數字就可以生成新的設計變量。” 4 N6 [: ]+ l7 @. ~% ] 還有一個想法,感覺可行,但去做時受阻于曲線建模的問題。 想法如下:用螺旋線代替螺旋槽,用兩個點代替鋼球與螺旋線接觸點,兩點連線約束在曲線的法線上。 心想螺旋線應該容易建模,但嘗試了一下,adams好像并不支持函數直接生成曲線。幫助文檔和教程里提到的全都是擬合曲線。現在就卡在這里了。+ H; U' N- c. b* ?) T# N 6 N- X$ s0 A$ a1 ~: r f) `9 x |
止疼劑 發表于 2017-6-24 17:15 按使用模型來建模,球和斜面只能是 solid to solid 接觸了。6 ~/ d. O9 ]! v$ H* g4 R 題外討論: adams 同時處理6對這樣的接觸,肯定不合適。從球的使用機制來說,它應該是使得主從動輪由滑動摩擦變滾動摩擦,降低摩擦的作用。真正傳遞扭矩的是主動輪和套的靜摩擦力。0 e4 [8 n2 a# [ \/ @# O 2 a* @1 ^4 ^) ]1 W ?- _; Q, ? |
pengjc2001 發表于 2017-6-24 11:198 |6 C0 k4 j8 W, r7 z; j& ^( ?2 Z 這樣理解沒問題。3 Z P! E J2 F, H& T3 v! |- y 第3條補充一下,由于鋼球爬坡產生的軸向行程比較小,彈簧力不足以產生足夠的壓力,所以彈簧壓縮一定行程后,主動輪要與彈簧座靠上,直接硬對硬傳遞正壓力。 |
止疼劑 發表于 2017-6-23 14:506 k* P0 J0 P( E5 b& P 主動輪逆時針轉時,鋼球在槽底未爬坡,從動輪帶動離合器動盤打滑;主動輪順時針轉時,鋼球爬坡,使主動輪右移壓緊離合器動盤定盤。9 I7 N+ f1 N5 C 先說下對問題描述的理解:9 F1 x9 M* O/ V1 H( N) k3 l# ?5 G 1、最終的轉動輸出是 從動輪 通過 離合器 輸出的。 2、主動輪逆時針旋轉,鋼球在槽底,此時彈簧壓縮量不夠,壓力不夠大,所以離合器打滑。3 F9 G" d0 M `3 x8 o' Z; o 3、主動輪順時針旋轉時, 鋼球沿槽向上滾動,使得主動輪向右運動壓縮彈簧,獲得足夠大的壓力后,使得離合器不打滑,實現最終輸出。! F! q7 u9 F! k( U: z0 @# F& e/ ? : w( y# O) s2 v. `, t8 f 不知理解是否有差異? |
| 信息量有點少, 我無法判斷 你要基于哪些因素 來優化 螺栓升角。涉及到模型假設及簡化問題 |
Archiver|手機版|小黑屋|機械社區 ( 京ICP備10217105號-1,京ICP證050210號,浙公網安備33038202004372號 )
GMT+8, 2025-7-13 16:22 , Processed in 0.076952 second(s), 22 queries , Gzip On.
Powered by Discuz! X3.5 Licensed
© 2001-2025 Discuz! Team.