|
發布時間: 2018-10-20 19:58
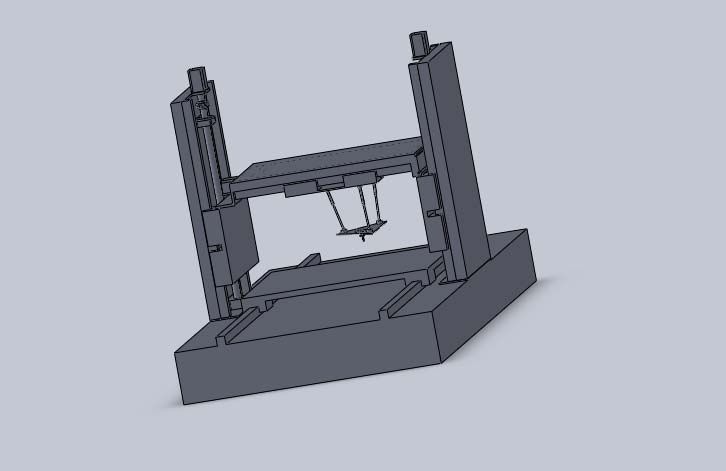
正文摘要:一臺電機帶動兩個絲杠,還有一個滑臺,正常來講,得是兩臺電機,但是我想就用一臺電機,如下圖 用步進電機還是伺服好?可否實現點動 |
展翅翱翔with 發表于 2018-10-22 20:05 看模型不完整,和DELTA機器人還差點,這個玩意我畢業設計就研究過。 總的來說,這個機器人不重,完全可以做成龍門加工中心的結構,橫梁移動,機器人部分最后做升降運動,這樣設計更合理成本更低。 雙絲杠可能還加了四根導軌,明顯多了一半的過定位,嚴格的設計,只有一根導軌作基準,然后都以它做基準來測量精度,要求實在太高了。 絲杠獨立電機驅動,還能通過電氣控制來調整誤差(直接光柵測量兩邊絲杠螺母位移),單電機通過機械結構傳動就沒法補償了 |
| 一般伺服比較精確,再加上同步帶或齒輪鏈條一類保證同步的結構即可 |
風刃 發表于 2018-10-22 12:55 三角架是一個并聯機器人的機構 是負責焊接的 |
|
按題說,不屬于精密機床,是可以搞兩個絲杠驅動,只要電機扭矩足夠,那么要求要求不高的話也可以通過同步帶傳動來驅動兩個絲杠一起傳動。絲杠精度和同步帶傳動肯定會造成兩個絲杠的回轉偏差,這樣對安裝技術要求,得到的左右絲杠位移精度卻不會太高。會不會卡死愛看你安裝的精度與結構壽命要求了。 步進電機的特性肯定沒有伺服電機好,額定扭矩也沒同等體積的伺服電機高吧,要求力矩大的往往步進電機都加了減速機傳動,還有步進電機是會丟步的。反現在正數控機床基本都用伺服電機驅動了。 好了再針對你照片模型,不知道你直接對工作作用的機構有多大,就是可以左右滑移部分好像不是很大,完全可以將這部分做最后的升降移動,參考龍門加工中心,而沒必要把整個橫向那么重的結構搞成升降,安裝技術要求高,成本投入大,反正就是一個非常不好的結構,而且作用立柱的剛性也不好。 所以我建議你改成龍門式結構,衡量固定在左右立柱上,先做一個滑架在橫梁上左右移動,然后工作部分相對滑架做升降運動。就你中間三個角的架子,相對比橫梁輕很多很多了,做升降軸不要太簡單 |
| 加一個同步轉向器,可使一臺電機同時帶動兩個部件運動。 |
| 看你這結構步進足夠了。 |
|
其中一根絲桿換成導軌不行嗎 |
| 最好是兩臺電機。單電機的話用同步輪同步帶,電機盡量中置。圖上y電機上部一邊一個,可以改到底部一個中置等距,這樣可以保證同步性和精確性 |
|
你要做什么?需要精確控制位置嗎? 若要精確控制位置采用伺服電機。 |
Archiver|手機版|小黑屋|機械社區 ( 京ICP備10217105號-1,京ICP證050210號,浙公網安備33038202004372號 )
GMT+8, 2025-7-27 08:11 , Processed in 0.076785 second(s), 22 queries , Gzip On.
Powered by Discuz! X3.5 Licensed
© 2001-2025 Discuz! Team.