|
慕容攬月 發表于 2016-10-18 12:22 4個構件,畫全了,1是主動件。7 _4 ]) V' i3 K' i |
muyangtu001 發表于 2016-10-18 10:358 o/ b& d) X# h& ? 你這圖的運動關系我沒看明白,畫全了嗎? |
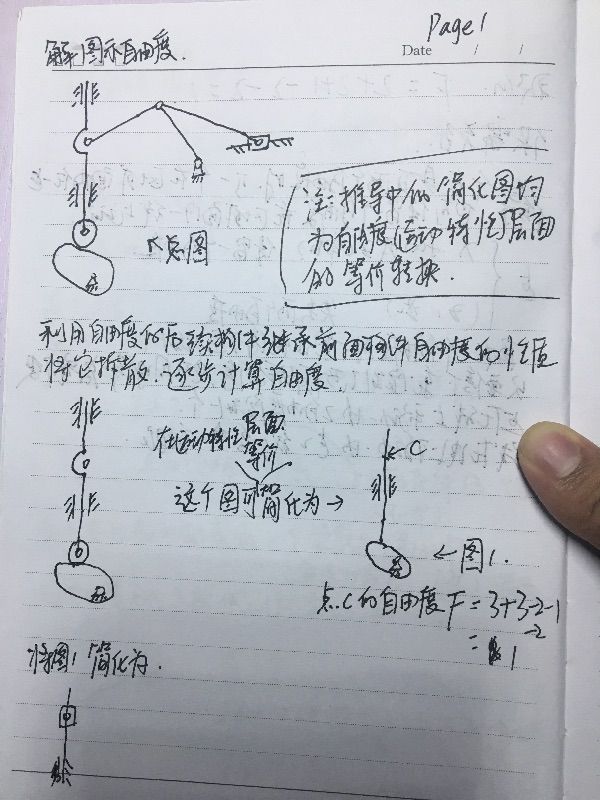
講真啊,這個機構并不復雜,一個虛約束,一個復合鉸鏈,一個局部自由度,而且每個運動副都很清晰明了。LZ這種后續構件繼承前面構件的理論在課本里沒怎么見過啊,點的自由度怎么理解?如果來個更復雜的,等價的過程是不是比直接計算還要麻煩啊。不過LZ這種深究的精神本屌佩服。
樓主感受下這個機構的自由度 ; v" B- H5 r P4 e$ v) I |
| 有用,非常巧妙。 謝謝。 |
左次無咎 發表于 2016-10-18 08:28 拆,根據等價轉換的規則,將復雜的拆為簡單的小機構,對小機構進行檢查自由度是否錯 |
慕容攬月 發表于 2016-10-18 08:24+ Y* ]5 i) M6 q7 A 怎么反饋啊( N. o% }* g( v4 M- B& F$ Q2 Q: ~/ r( Q |
永亮 發表于 2016-10-17 21:56 你這是直接套公式,對自由度沒有向概念內深入,當你的構件及運動副數漏時,很難發現問題,沒有反饋驗證機制 |
| 學習了,謝謝! |
| 很久沒有計算過了,只知道這么計算3x6-2x8-1=1 別的沒用過,表示沒看懂 |
Archiver|手機版|小黑屋|機械社區 ( 京ICP備10217105號-1,京ICP證050210號,浙公網安備33038202004372號 )
GMT+8, 2025-7-22 17:15 , Processed in 0.082928 second(s), 21 queries , Gzip On.
Powered by Discuz! X3.5 Licensed
© 2001-2025 Discuz! Team.