|
發布時間: 2016-5-29 14:09
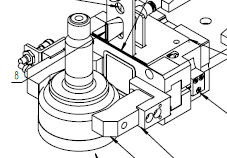
正文摘要:工件大概兩公斤重,工件上面有切削液,此手爪是機器人機床上下料手爪,目前手爪抓取工件不穩定,工件有晃動,而且要通用手爪,抓取工件的外徑范圍大概從80-94,請各位支招,謝謝 ... |
LIUYASHAN 發表于 2016-5-30 13:09 你可以去咨詢一下他們的技術支持,雄克這方面還是很專業的,他們應該可以根據你提供的數據推薦合適型號的 |
塵世天涯 發表于 2016-5-30 13:07 我的就是雄克的,已經是終極品牌了 |
楊經保 發表于 2016-5-30 12:48 基本上是按照您說的思路設計的,目前再優化設計一下,手爪的材質更換一下看能不能解決 |
LIUYASHAN 發表于 2016-5-30 11:59 樓主你已經知道是夾持力不夠了。 可以更換更大的夾爪,如果空間受限,可以購買大品牌的氣爪,據我所知,Festo的氣爪夾持力大于SMC(大約1.5倍吧),SCHUNK的又大約是Festo輸出力的兩倍。SCHUNK已經是終極品牌了。只要你肯花錢。 |
|
三個重點: 1.抓手的行程:行程決定是不是能適應抓取多種工件,給最大實體輪廓和最小實體輪廓都要放一定的間隙量。 2.夾持力:這個要計算一下,找一個平衡點,保證工件最大重量和最小重都不會掉落、松動滑脫。 3.工件的質量中心盡量與夾持中心重合,不能重合的,并且工件需要翻轉的,要計算工件的轉動慣量,增大夾持力。 把握住這三個重點,你的問題就解決了 |
WUHANLIST 發表于 2016-5-30 08:48 以上都可以做得到,就是夾住后,用手用點力可以撥動工件 |
| 我是來學習的 |
| 學習 |
| 增大摩擦力 |
Archiver|手機版|小黑屋|機械社區 ( 京ICP備10217105號-1,京ICP證050210號,浙公網安備33038202004372號 )
GMT+8, 2025-8-23 18:08 , Processed in 0.086007 second(s), 30 queries , Gzip On.
Powered by Discuz! X3.5 Licensed
© 2001-2025 Discuz! Team.