|
斯文棒棒 發表于 2024-12-11 13:31 四軸的怎么旋轉 |
斯文棒棒 發表于 2024-12-11 13:31 旋轉的軌跡要變嗎 |
我叫磁力棒 發表于 2024-12-11 15:32 那如果定義刀頭必須向外,那行程范圍又是多少啊 |
cspcm8 發表于 2024-12-11 14:55 第六軸會旋轉的,實際作用點是0-3米,可以去撞手臂 |
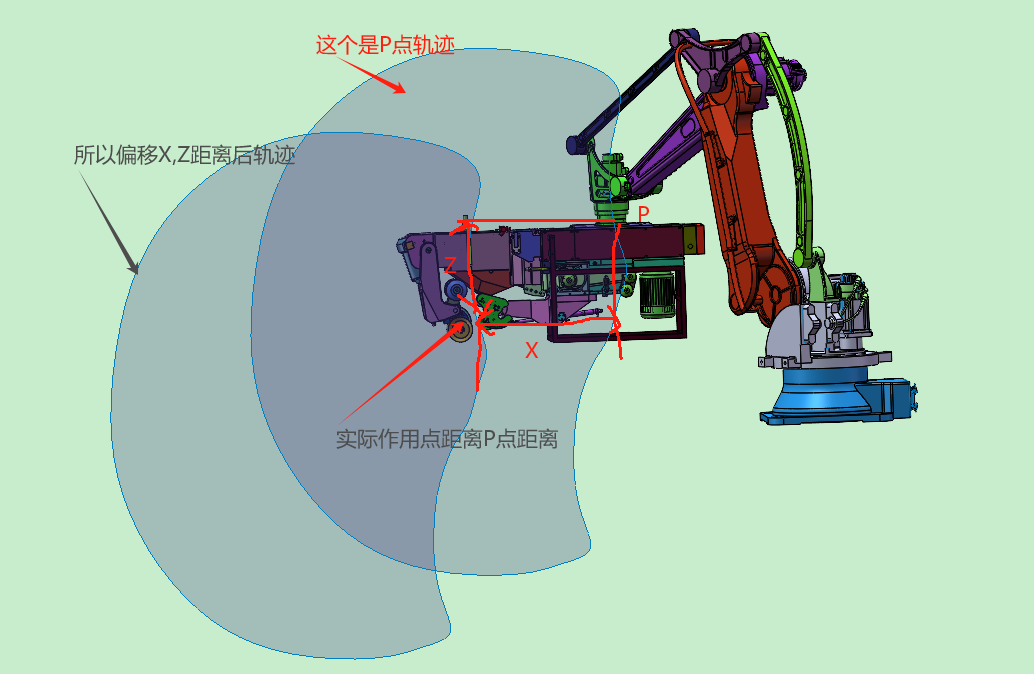
| 例如機器人臂展軌跡0.5--2米,p點掛載1米的刀具,那有效距離不是就到1.5---3米了;這樣理解是否正確呢 |
crz222 發表于 2024-12-11 13:36 同事也這樣說的,但總覺得掛載的工裝距離不加上去,感覺不對;就想不通什么地方出錯了 |
| 就按原來的P點做運動仿真,不要偏移,偏移了容易出錯 |
| 如果只是平移,那就沒問題。如果平移加旋轉,那就不對。 |
Archiver|手機版|小黑屋|機械社區 ( 京ICP備10217105號-1,京ICP證050210號,浙公網安備33038202004372號 )
GMT+8, 2025-7-19 01:54 , Processed in 0.069984 second(s), 22 queries , Gzip On.
Powered by Discuz! X3.5 Licensed
© 2001-2025 Discuz! Team.