|
發布時間: 2024-5-30 10:44
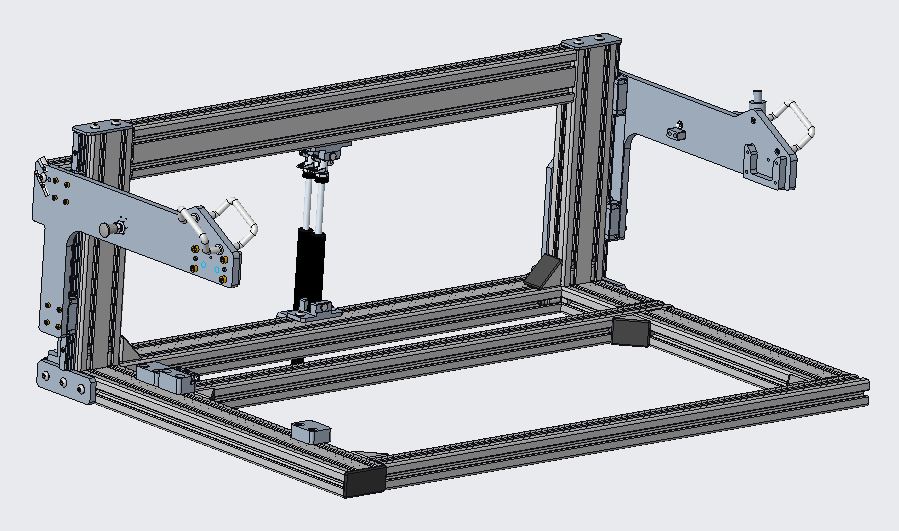
正文摘要:目前做了一款手動夾具,有個升降需求行程80mm,負載25-30Kg變動,不要外部動力,需要快速升降。 目前使用了位置可控氮氣彈簧+導軌,但是效果不理想,因為理論上初始位置和壓縮位置差0.4倍負載,加上有段懸臂,似乎 ... |
DaedraMech 發表于 2024-5-30 17:02 數學功底厲害,最后一句,直接結論是圓方程,一下子沒明白,后來明白了,把極坐標公式帶入圓的標準方程就得到了, |
| 用兩個平行連桿代替導軌應該好一些,至少不會卡。 |
wswker 發表于 2024-5-30 13:22 黃色負載垂直上下?降低人工的出力強度? |
樵耕漁讀 發表于 2024-5-31 11:39 大概因為正常人只有兩只手吧 |
| 80mm升降行程不大,為何不考慮機械傳動,例如渦輪蝸桿手去動揺或者省力杠桿手動去扳 |
| 我也覺得這個懸臂的問題比較大,加對稱配重可能解決問題。 |
hmhnh 發表于 2024-5-31 08:50 要么配重,要么恒力彈簧。 |
| 做個配重,兩端重量一樣,形成一個平衡體,像天平,微小的動力就能驅動一端上下。停再設置個小的彈力機構就行了,釋放移動,停,側壓形成摩擦阻尼定位 |
|
本帖最后由 DaedraMech 于 2024-5-30 18:24 編輯 恒力彈簧+阻尼,各種升降機構里(如顯示器升降)很成熟的方案了; 還可以用比較長的氣彈簧,橫向斜置,其推力沿豎直方向分量按三角函數規律變化,只要升降行程內氣彈簧的擺角足夠小,其推力的豎直分量可以看作近似不變; 如果搞不到足夠大的恒力彈簧或足夠長的氣彈簧,也可以這樣做: 取用普通彈簧一端固定,一端在滑槽中滑動,并拉動一根滑桿升降。 
所謂“無外部驅動力”,可以重述為“系統總機械能不變”,這一機構中可以理想地認為只有彈性勢能和重力勢能,二者相互轉化,任意時刻變化量代數和為零。 據此可列微分方程,求解出滑槽曲線其實是圓弧:
一般滑槽不易加工、裝配和維護,可以設計連桿機構近似擬合這一軌跡。 |
Archiver|手機版|小黑屋|機械社區 ( 京ICP備10217105號-1,京ICP證050210號,浙公網安備33038202004372號 )
GMT+8, 2025-7-14 19:34 , Processed in 0.071276 second(s), 24 queries , Gzip On.
Powered by Discuz! X3.5 Licensed
© 2001-2025 Discuz! Team.