|
發(fā)布時間: 2023-12-18 14:57
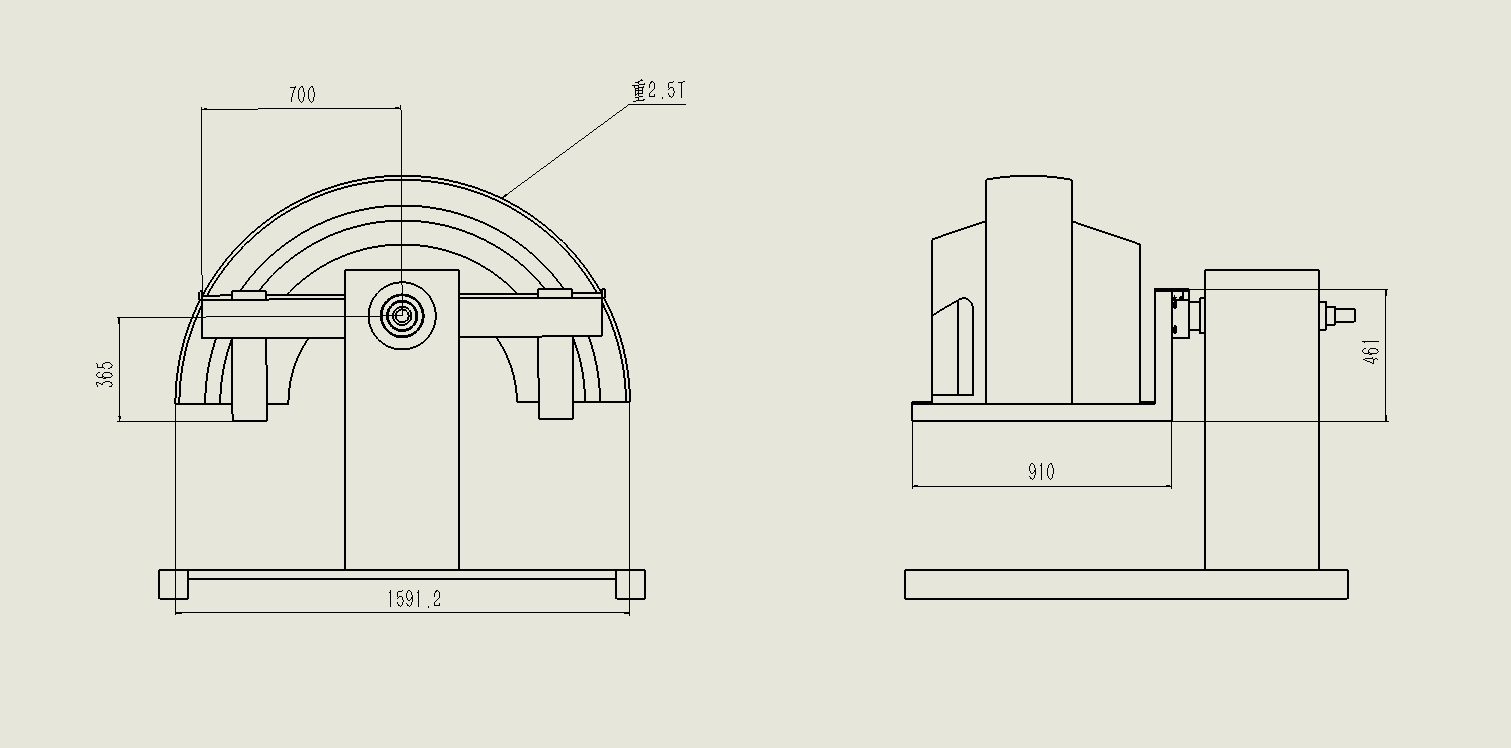
正文摘要:本帖最后由 小蝸牛zp 于 2023-12-18 16:58 編輯 我這邊有個翻轉(zhuǎn)機構(gòu),3個半圓軸瓦共用一個翻轉(zhuǎn)機構(gòu),1、2.5噸(重心與軸心同心)2、2噸(重心在軸心下方40mm)3、1.5噸(重心在軸心下方70mm),這樣的機構(gòu)咋計算 ... |
DaedraMech 發(fā)表于 2023-12-19 17:02 很棒,感謝 |
DaedraMech 發(fā)表于 2023-12-19 17:02 學(xué)習(xí)了,厲害 |
DaedraMech 發(fā)表于 2023-12-19 17:02 大佬,M2我不需要放安全系數(shù)嗎? |
小蝸牛zp 發(fā)表于 2023-12-19 09:03 這個中專的汽車專業(yè)標配,去當?shù)卣乙徽遥瑴p速器一般是可以自鎖,估計是蝸輪蝸桿的 |
| 最近我也要弄這種,不過我的工件只有400kg |
DaedraMech 發(fā)表于 2023-12-19 17:02 很詳細,非常感謝,手下我的膝蓋吧,大神 |
DaedraMech 發(fā)表于 2023-12-19 17:02 雖然看不懂,但是可以點贊! |
|
負載需要的驅(qū)動力矩可以簡單地分為三部分:一部分用來抵抗負載的慣性以達到一定轉(zhuǎn)速,一部分用來克服其重力(如果有偏心),還有一部分用來克服各運動副摩擦。 接下來以你這里面2t,偏心40mm的情況為例,第一部分可以應(yīng)用M=Jα。 轉(zhuǎn)動慣量J可以在網(wǎng)上找到很多計算公式,但在SW里直接計算要快得多。此外J與轉(zhuǎn)軸的位置密切相關(guān),因此我們可以在轉(zhuǎn)軸上建立坐標系來考察特定軸上的轉(zhuǎn)動慣量。如圖所示,我們很方便地得到了負載相對轉(zhuǎn)軸的轉(zhuǎn)動慣量為238.14kg·m^2(必須注意,轉(zhuǎn)動慣量由積分得來,即使我使用了與你相同的質(zhì)量和質(zhì)心位置,只要質(zhì)量的分布不同,轉(zhuǎn)動慣量的結(jié)果就可能差很多,所以你不能直接拿我這里的數(shù)據(jù)套用到設(shè)備中)。 
角加速度α則與你的工況相關(guān),假設(shè)這個設(shè)備需要在2s內(nèi)把負載加速到0.5轉(zhuǎn)/秒, 那么α=Δω/Δt=2π·0.5/2=1.57rad/s^2。 負載如果不偏心,各運動副也十分光滑,那么就直接有M1=Jα=238.14×1.57=374Nm,通過motion仿真也得到同樣的結(jié)果:
對于第二部分,由于負載偏心,我們驅(qū)動動質(zhì)心升高時要克服重力做功,如圖所示,這部分重力矩的變化規(guī)律比較容易得出:
即M2=mg·e·sinθ=mg·e·sinωt=2000×9.8×0.04×sinωt=784sinωt,且易知θ=90°時力矩最大,為784Nm,通過motion仿真也窺見M1、M2疊加后的力矩變化規(guī)律:
最后,摩擦力矩M3不必算出,而是可以通過機械效率(如減速機樣本中的數(shù)據(jù)、各種標準件的傳動效率經(jīng)驗表)涵蓋這部分,我們假設(shè)機械效率為60%,那么合力矩M=M1+M2+M3=(M1+M2max)/0.6=(374+784)/0.6=1930Nm,通過motion仿真也可以得到三者疊加后的力矩變化規(guī)律:
而如果你最終選擇了一款1:160的減速機,取個工況系數(shù)K=1.2,那最終需要的輸入力矩就是Mi=1.2×M/160=19.47Nm。 |
LiNing_jrjub 發(fā)表于 2023-12-19 09:31 那這種的應(yīng)該要怎么計算呢? |
Archiver|手機版|小黑屋|機械社區(qū) ( 京ICP備10217105號-1,京ICP證050210號,浙公網(wǎng)安備33038202004372號 )
GMT+8, 2025-7-25 11:57 , Processed in 0.075740 second(s), 22 queries , Gzip On.
Powered by Discuz! X3.5 Licensed
© 2001-2025 Discuz! Team.