|
| 公式太多頭痛 |
lanse888 發表于 2023-2-3 10:43 重力肯定屬于主動力。你的計算分解肯定也沒問題,只不過是繞路了。我計算的話就是只用a角 表達出S1 和S2的關系式 帶入就可以。只不過S1和S2的兩個函數會比較麻煩。我找個案例剪叉機構計算與虛位移原理.docx 全文免費 (book118.com) 希望對你理解有幫助。 |
|SNT發表于 02-03 09:55有兩點誤區:<br> |
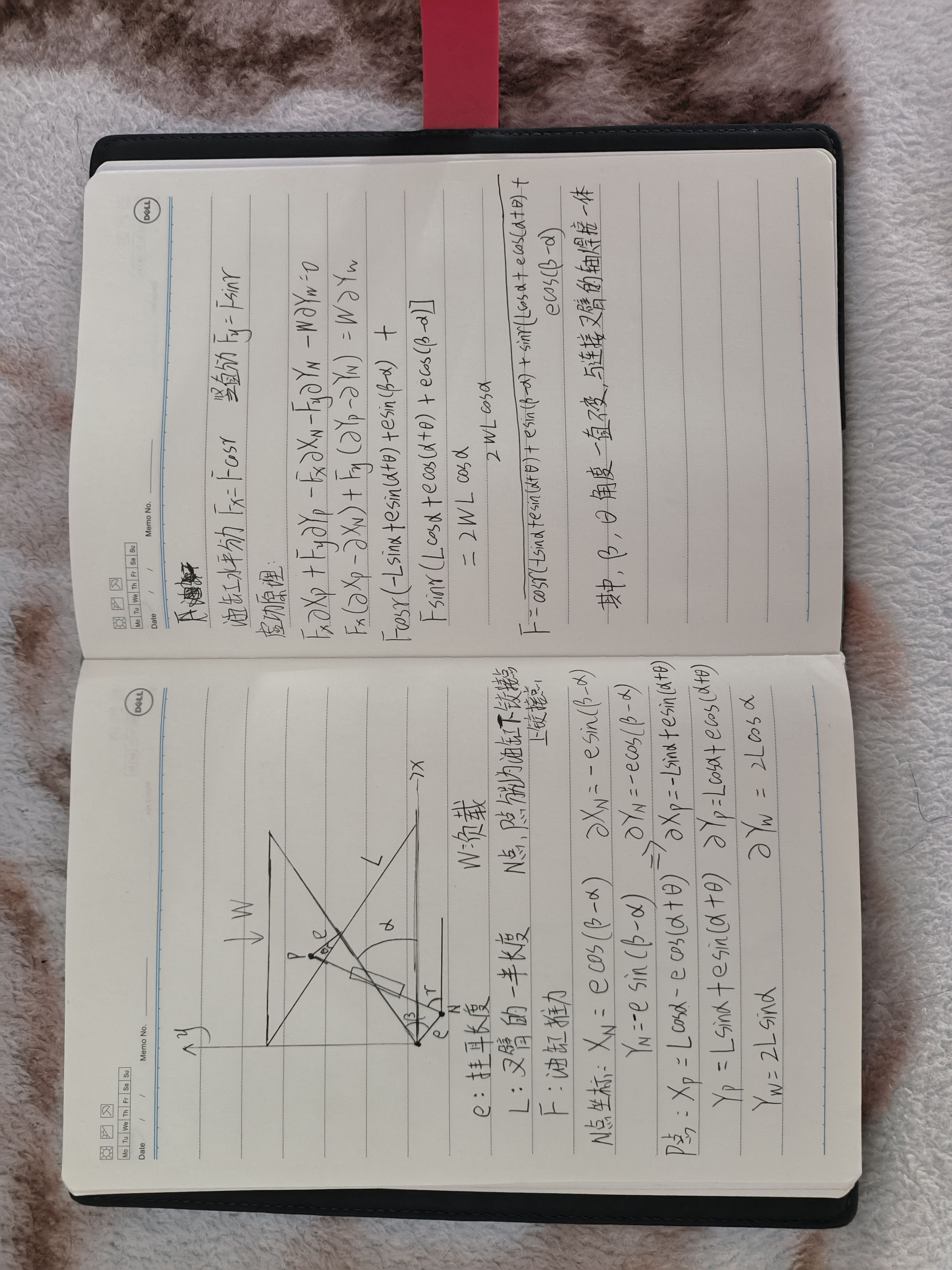
|SNT發表于 02-03 09:55有兩點誤區:<br> 第一點:虛功原理不是主動力所做的虛功之和為零嗎,那我虛位移有x,y兩個方向,我的油缸推力也要分解成x,y兩個方向吧。還有那個固定角β屬于這個叉臂的物理屬性了,類似叉臂長度L,掛耳長度e,我只是提一嘴,這個β角為掛耳與叉臂的焊接角度 |
|
有兩點誤區: 1.虛功原理是為了簡化復雜的力學分析計算,而采用的能量守恒算法來使問題簡單化。而你又做了力的分解,在分解的基礎上再用虛功,多此一舉。 2.為了求導而求導,對坐標位移做角度的求導,你沒有依據,引入固定角β也沒有意義。 正確的算法應該是F*S1=G*S2 其中s1、s2均為某時刻位移微小變化量,在這個微小時刻我們默認力的方向與位移一致,這是核心。 如果S1與S2 均可以通過圖中α角簡單表示出來,則不需要任何公式變化就可以求出,如果不能用同一α表示 才需要對等式兩邊以dα,進而轉化為位移在α上的導數函數了。 這是虛功的質,理解其本質你才會正確應用。 |
截圖.png (569.95 KB, 下載次數: 76)

| 沒搞過,幫頂 |
| 不懂,圍觀 |
Archiver|手機版|小黑屋|機械社區 ( 京ICP備10217105號-1,京ICP證050210號,浙公網安備33038202004372號 )
GMT+8, 2025-7-16 00:05 , Processed in 0.105258 second(s), 21 queries , Gzip On.
Powered by Discuz! X3.5 Licensed
© 2001-2025 Discuz! Team.