|
發布時間: 2021-8-17 13:11
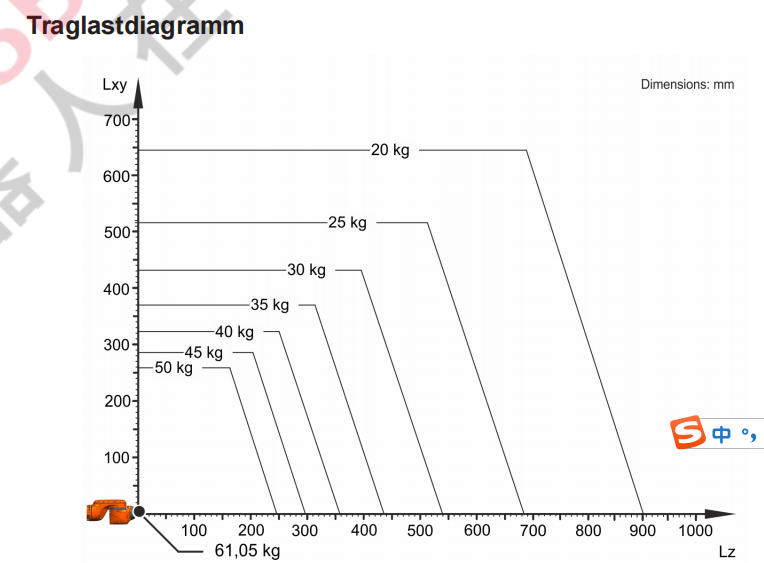
正文摘要:六自由度機械臂載荷問題,在伸出最長時候應該承受載荷最小,不可能是個固定值,但是樣本里只有最大載荷,和額定載荷。 1.還有他的工作范圍圖,為什么不是對稱的,轉過去的不就是一樣嗎,底座能360度旋轉。 2.Lxy與Lz ... |
| 通常情況是伸出去越遠,負載力會越小了! |
|
關于機械臂的負載,本身也是一個相對的參考值,不要單純看這個表來選型。這個圖表只能表達的是一個質心分布的較為理想狀態,但實際使用時,會根據你的負載夾具形狀、尺寸有很大影響,實際上以我的經驗,質心還不是最好的總結,更受“負載”轉動慣量的影響,一般機械臂的技術參數也會附有4、5、6關節所能加載的慣性力矩,這個參數說的就是這個意思。另外,你所說的各軸伸直的情況,確實是負載能力最低的,一般情況下,不太會用到這種姿態,確實要用到這種姿態,還帶了這個圖表所述的最大負載,可能你需要手動降速,或者某些機械臂公司,會內置了一定的負載辨識與瞬態PID調節與動力學變速功能。所以最終的實際表現,應該是,你可以在這樣的姿態下掛最大負載,也是100%的速度在跑,但實際的節拍會比你在其他姿態下掛小負載的時候慢了較多! |
| 學習了 |
|
Lxy與Lz是末端負載質心坐標系相對于末端法蘭工具坐標系的偏移距離; Lxy:是x,y兩個方向的合位移; Lz:是z方向的位移; |
| 俯視圖 不就是側視圖最大半徑畫個圓 |
Archiver|手機版|小黑屋|機械社區 ( 京ICP備10217105號-1,京ICP證050210號,浙公網安備33038202004372號 )
GMT+8, 2025-7-28 12:49 , Processed in 0.068145 second(s), 22 queries , Gzip On.
Powered by Discuz! X3.5 Licensed
© 2001-2025 Discuz! Team.