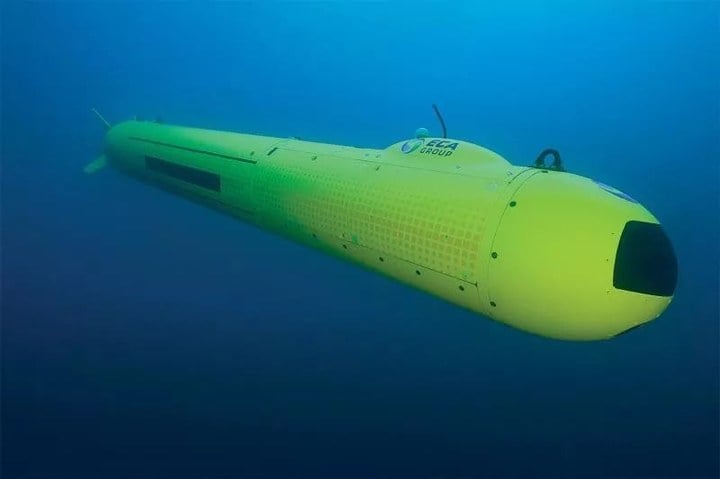
一艘黃色的水下小艇,在你的面前敏捷地滑過:
5 D5 Z* i; u2 E" F6 f6 Y
來到一處設(shè)施面前,小艇停了下來。它的身體開始展開,兩只手臂緩慢伸出:
4 C" k$ }3 K! t! u! i) U
, C& e$ ?0 Q8 v/ J
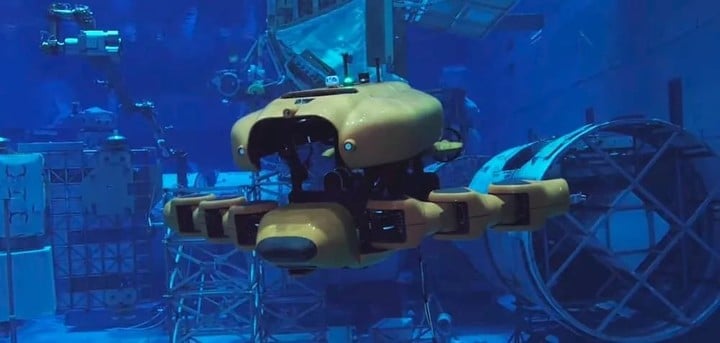
大約三十秒后,手臂展開完成!剛才的潛水艇,已然變成了一架水底機(jī)器人。
' D. {) w8 @% }- U6 F$ Q. y
▲ 動圖經(jīng)過去幀壓縮,顯示效果為 6x 速度
5 C) U; K6 @( Q, I0 k$ U你所看到的這些,并非爛尾科幻大片《變形金剛》的續(xù)貂之作。
這里,正是美國宇航局 NASA 位于得州休斯頓的約翰遜太空中心。而這臺無人機(jī),是當(dāng)?shù)匾患覄?chuàng)業(yè)公司剛剛發(fā)明出來的,真實(shí)存在的「水下變形金剛」: Aquanaut.
# ~0 C9 {2 H4 m( ]
據(jù)休斯頓機(jī)甲公司 (Houston Mechatronics Inc. 簡稱 HMI) 介紹,他們開發(fā)的這臺機(jī)器人,是目前世界上第一臺能夠在工作環(huán)境下完成變形的水下雙姿態(tài)無人機(jī)器人。
0 |% D0 f* S# a# h9 O# V9 p
何謂「雙姿態(tài)」?這還要從水下無人機(jī)的類型,「展開」來講。
2 i w. P; X S6 j0 T* t$ ?1 _8 A5 m
在過去,水下無人機(jī)通常有兩種形態(tài)。
7 \ e# x" @& y% |. M7 C2 n8 b$ z
第一種是魚雷型。流線型的艇身是對水下動物的仿生,使得無人機(jī)可以在水中快速前進(jìn)、完成幾十甚至上百海里的長距離移動。這類無人機(jī)已經(jīng)存在多年,安裝相機(jī)、傳感器和采樣裝置,可以用于科考任務(wù)。但是這一型的無人機(jī)的問題,在于它們無法和水下世界主動發(fā)生交互:
4 O ~2 S8 s- {
9 u3 H j h) D3 e9 }( {% P
另一種,則是一點(diǎn)都不酷,方方正正,看起來十分臃腫的水下操縱型機(jī)器人。因?yàn)槊嫦蛞恍└鼜?fù)雜的操控作業(yè),這類機(jī)器人采用了另一種仿生路線,用機(jī)械臂完成工作。但是它的抗極端環(huán)境(比如洋流)能力很差,部署要求很高:
, m. L$ H4 H/ W I" [0 `

3 i# e# ^* y6 @8 X; l Q. h
而 HMI 公司所開發(fā)的 Aquanaut 機(jī)器人,采用了一個更加大膽的思路:對于魚雷型和操縱型這兩種有著巨大差異的設(shè)計(jì)理念,它成為了兩者首次「合體」的產(chǎn)物。
Aquanaut 的首席工程師 Sandeep Yayathi 在接受 IEEE Spectrum 采訪時表示,當(dāng)他們決定開發(fā)水下機(jī)器人時,從一開始就想要采用視頻中這種「變形金剛」式的風(fēng)格。
「我小時候是個變形金剛迷,設(shè)計(jì)職業(yè)道路時,我就想這輩子一定要親手造出一臺變形金剛來,」Yayathi 說。
; `' g9 g5 f4 J) S4 d, a+ F3 V
但是大部分人都清楚,面向一個特定的用途專門開發(fā)的技術(shù),往往比一個「四不像」更好用。因此,盡管在科幻電影中看起來很酷,變形機(jī)器人很長時間以來都不被專業(yè)人士看好。
% |- P+ X5 P# c; z* x! U6 o! Z& D

5 a! r7 L5 W# W! X3 U u- t
但是到了水下,一切就不一樣了。
正如前述,在過去水下機(jī)器人只有兩種可選:選擇流體動力、長距旅行,意味著無人機(jī)沒有交互能力;選擇操縱型,意味著必須要到地才能部署,在極端環(huán)境下的抗干擾能力差。
* o$ i2 N4 v# s5 q9 D6 x1 W
比如海上鉆井平臺和海底光纜公司,對于水下檢查、維修的有著持續(xù)需求,也在使用機(jī)器人技術(shù)。但事實(shí)上,它們所依賴的機(jī)器人,已經(jīng)很久沒有發(fā)生過遷越式的創(chuàng)新了。
如果能有一臺平時能在鉆井平臺之間,或沿著海底光纜快速移動,到了位置立刻變身維修工的機(jī)器人,既能節(jié)省人工、減少傷亡風(fēng)險(xiǎn),也降低了機(jī)器人使用和維護(hù)的成本,對于這些公司將會帶來極大的便利。
5 F6 G6 U2 E4 O
而這臺「水下變形金剛」,就是為了改變這一切而誕生的。
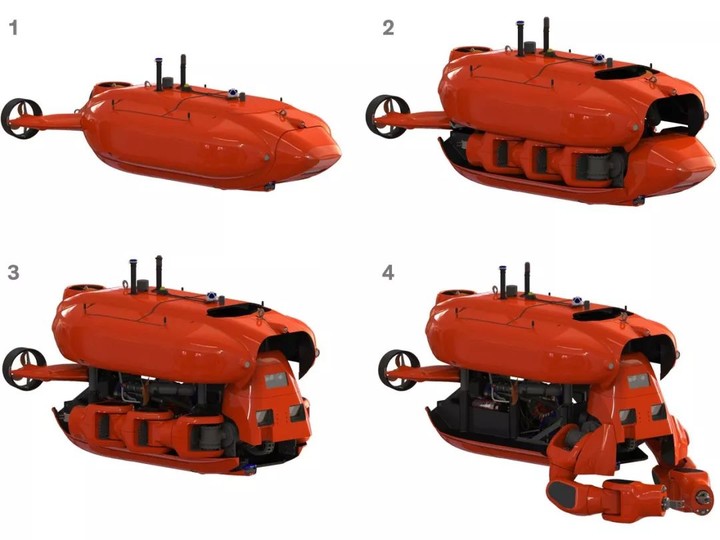
上圖中,在小艇狀態(tài)下,Aquanaut 有著優(yōu)異的流體動力學(xué)(1);到了位置,機(jī)蓋升起,露出機(jī)械臂(2);隨著機(jī)械臂的展開,小艇的頭部也慢慢升起進(jìn)入工作位置,露出攝像頭、聲納、3D 傳感器等,機(jī)艙內(nèi)也有額外的水下推進(jìn)裝置,用于調(diào)整姿態(tài)(3);手臂上標(biāo)配鉗爪,也可以替換其他設(shè)備,(4)。
6 H# I! U; Q. A' l4 U
變形之后,它的機(jī)械臂可以完成許多不同的操縱作業(yè),比如抓取、使用工具等等。機(jī)械臂的靈活度很高,因?yàn)槊恳还?jié)都有獨(dú)立的電機(jī)控制。
不僅如此,Aquanaut 還有很大程度上的自主作業(yè)能力,用戶可以發(fā)出「順時針旋轉(zhuǎn)閥門 90 度」的命令,無人機(jī)可以自己根據(jù)現(xiàn)場情況,調(diào)整姿態(tài)、握住閥門、完成作業(yè)。
和過去的操縱型水下機(jī)器人相比,Aquanaut 還有一個優(yōu)勢,就是不再需要線纜的保護(hù)。目前,它采用鋰電池驅(qū)動,最遠(yuǎn)單程可以達(dá)到 200 公里,約合 108 海里。
拿海底光纜公司舉例,當(dāng)發(fā)生故障時,它們首先需要檢查故障位置,然后維修人員駕船到達(dá)地點(diǎn),把一個冰箱一樣的操縱機(jī)器人放下去,完成維修。過程中可能需要真人,還可能需要運(yùn)用多種不同的機(jī)器人。
+ e" j x3 p+ ]% `/ H; Q- D
而現(xiàn)在,只需要一臺無人機(jī),就可以完成檢查、維修的工作,在上百海里外遠(yuǎn)程部署也沒有問題。
9 F9 S, |! }: \
HMI 的很多員工都曾在 NASA 工作。盡管 NASA 是一個太空探索的科學(xué)機(jī)構(gòu),有趣的是,它的很多工作都是在水下完成的。它不但有水下研究部門,因?yàn)榕捎詈絾T上天之前需要大量訓(xùn)練,這些工作中很多也是在水下完成的。
通常人們都會認(rèn)為,上天比下海更難,但在 HMI 首席技術(shù)官 Nic Radford 看來,讓機(jī)器人在水下正常工作,反而比在太空中需要更強(qiáng)大的技術(shù)。
8 Q" |! q+ ?2 ?% Z+ p. s7 d, u
「太空是一個近乎完美的環(huán)境,而水下更加復(fù)雜,動態(tài)程度極高,」他給了一個簡單的估算:讓機(jī)器人在水下工作,比在太空中可能難至少 50 倍。
創(chuàng)辦 HMI 之前,Radford 在 NASA 參與 Robonaut 機(jī)器人計(jì)劃,其研制的機(jī)器人已經(jīng)進(jìn)入了國際空間站。Yayathi 則是 NASA 月球車計(jì)劃的主要工程師之一。
HMI 創(chuàng)辦于 2014 年,目前已經(jīng)獲得了 2,300 萬美元的風(fēng)投資金。雖然目前還沒有真的「下海」,Aquanaut 也已經(jīng)在 NASA 約翰遜航天中心的巨型「游泳池」里進(jìn)行了大量測試。
4 q; M2 q# U! ?; E; K
該公司計(jì)劃繼續(xù)對 Aquanaut 進(jìn)行優(yōu)化,使得它可以自動前往維修地點(diǎn)、返回,只在作業(yè)期間需要人的控制、監(jiān)督。
% H2 L& `! @1 w2 a. J, A
不僅如此,他們還有想法,在全球多地的海上部署無人船,作為 Aquanaut 的中繼站,進(jìn)而形成一個全球運(yùn)作的網(wǎng)絡(luò)。這樣,用戶可以坐在倫敦的辦公室里,遙控位于印度洋的水下無人機(jī)。
如果鉆井平臺和海底光纜公司采用了這項(xiàng)技術(shù),意味著維修工作將不再需要大批人馬乘著船,每天奔波在大海上。盡管這些利潤導(dǎo)向的公司對于技術(shù)換代很謹(jǐn)慎,他們應(yīng)該會歡迎任何能夠降低風(fēng)險(xiǎn)和成本的「黑科技」,包括這臺「水下變形金剛」。
「用無人機(jī)完成水下工作,會有更好、更具成本效益的方式。我們的任務(wù)就是證明這一點(diǎn),」Radford 表示。
+ Y8 A' G( ]" ]5 L

轉(zhuǎn)自硅星人 作者光譜、杜晨

| 歡迎光臨 機(jī)械社區(qū) (http://www.ytsybjq.com/) | Powered by Discuz! X3.5 |