zsddb 發表于 2016-1-30 23:49
雖然我完全明白博士的意思,但我覺得之前有個哥們貼的那個動畫更能說明問題。* c5 P! H. t; X* F7 l. i' N
我的意思是兩者都對,只是觀 ...
zsddb 發表于 2016-1-30 23:49
雖然我完全明白博士的意思,但我覺得之前有個哥們貼的那個動畫更能說明問題。* c5 P! H. t; X* F7 l. i' N
我的意思是兩者都對,只是觀 ...
zsddb 發表于 2016-1-30 23:49
雖然我完全明白博士的意思,但我覺得之前有個哥們貼的那個動畫更能說明問題。
我的意思是兩者都對,只是觀 ...
逛逛論壇 發表于 2016-1-31 00:207 x B5 b" e+ r$ E- E
這公式有錯嗎?
Z=齒數,ω=角速度
劉景亞 發表于 2016-1-31 00:04
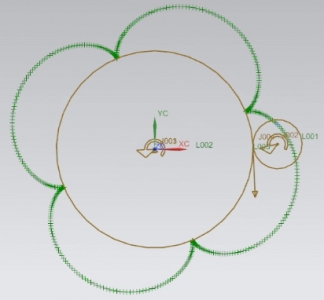
對的,@番茄唐龍 大俠的第二張圖中標記的矢量旋轉了5圈,正好驗證我本帖所說。
 ) \: n1 T, P0 g M+ a/ `7 L
) \: n1 T, P0 g M+ a/ `7 LLIAOYAO 發表于 2016-1-31 01:03
俺將動畫截屏如下,注意小圓內大三角尖點方向,6張圖都是大三角尖點朝下截屏! o9 b; J: D7 n7 m9 y
7 M% F9 l# [3 l
起始位置,
海鵬.G 發表于 2016-1-30 23:26
這帖子。強勢圍觀!俺沒看到一個矢量在兩個坐標系下的映射關系,俺是看醉了。
海鵬.G 發表于 2016-1-30 23:26
這帖子。強勢圍觀!俺沒看到一個矢量在兩個坐標系下的映射關系,俺是看醉了。
不懂的太多xx 發表于 2016-2-1 10:27
問題爭論不休,有兩個去處:一個是往高處走,尋求未知的解法;一個是往低處走,初始認知出現些許偏差。對于 ...
虛荒世 發表于 2016-1-31 13:03
這個是純滾動,接觸點的絕對速度不等于零的么,設小齒輪公轉角速度為w1,自轉為w2,則牽連速度為w1×(4+1),相 ...
逛逛論壇 發表于 2016-2-1 11:36
老師,原題問的是:請問連接架每轉動一圈!Z2轉動多少圈? 這里理解他的‘圈’就是‘轉’。
他沒有問機構 ...
| 歡迎光臨 機械社區 (http://www.ytsybjq.com/) | Powered by Discuz! X3.5 |