機(jī)械社區(qū)
標(biāo)題: 小車爬坡的抗傾覆怎么分析啊 [打印本頁(yè)]
作者: zhj29 時(shí)間: 2023-12-12 14:24
標(biāo)題: 小車爬坡的抗傾覆怎么分析啊
就是類似圖片這么個(gè)小車 上邊要有重物,想要分析這個(gè)車在爬坡的時(shí)候會(huì)不會(huì)翻車,可能你會(huì)說試試不就知道了,但是需要提供軟件的分析支持文件,謝謝各位大神們了,希望賜教
9 M( ]6 ?8 c1 ]7 _3 x7 E' E) l4 L! g
& d* ] g' Q C$ B! I/ w[attach]555886[/attach]8 m3 x# S b: t, A
作者: bravo090 時(shí)間: 2023-12-12 14:38
要算重心,然后算力矩。 把力分成垂直斜坡和平行斜坡
作者: zhj29 時(shí)間: 2023-12-12 14:41
6 J9 e' D9 M5 W1 y4 w0 B8 `- }* Y6 D用軟件怎么分析呢,比如sw simulation 可以分析嗎
1 w& [2 X) z& o8 ^
作者: 游離縉云 時(shí)間: 2023-12-12 14:48
靜力分析?
作者: zhj29 時(shí)間: 2023-12-12 14:49
( N# g- T/ U; p: K0 V( k
嗯 是的
$ q& L2 o+ U j \4 e4 {' F+ C
作者: 呵呵hahei 時(shí)間: 2023-12-12 14:57
先要看 你小車爬坡的時(shí)候 碰不碰底盤。。。
作者: zhj29 時(shí)間: 2023-12-12 15:01
1 q& r$ Q5 m* U# B" K然后呢,用什么軟件能分析呢( o+ [; t/ R7 Q
作者: 呵呵hahei 時(shí)間: 2023-12-12 15:06
這個(gè) 我還真不知道,我是看機(jī)械設(shè)計(jì) 這本書上有個(gè)個(gè)叫自鎖角的論證,貌似 這個(gè)對(duì)斜面的角度有要求,小于這個(gè)斜面角度的話,物體靠摩擦力能保證不下滑,軟件的話 ,不知道。。。
作者: leioukupo 時(shí)間: 2023-12-12 15:23
這要啥軟件分析??不是用高中物理甚至初中物理就能解決的嗎?
作者: 湯圓園 時(shí)間: 2023-12-12 15:26
動(dòng)能轉(zhuǎn)化成重心升高的勢(shì)能,看看需要走最大的坡會(huì)不會(huì)翻,看你圖感覺還是算算能爬多少°的斜坡再說吧
作者: zhj29 時(shí)間: 2023-12-12 16:17
5 t6 W' @: j2 m能詳細(xì)的說一下怎么計(jì)算嗎
j3 m- T/ o7 r, m# x
作者: 麥哥123 時(shí)間: 2023-12-12 19:46
在SW用草圖畫一下接近角和離去角,不考慮動(dòng)力因素看能爬多大坡,
7 p( K2 G8 F0 ^( `! Y; |按你這個(gè)比例的接近角,只要重心不高,在兩輪之間,都沒問題
作者: 詹姆斯007 時(shí)間: 2023-12-12 20:30
需要知道負(fù)載重心高度和小車的輪距,還有小車的高度。
2 R, g* b9 T, X1 L起重機(jī)設(shè)計(jì)有一個(gè)穩(wěn)定性計(jì)算的方法。+ u. b2 z6 I' {% @; N/ G9 Z+ ]! B+ u
在小車爬坡時(shí),會(huì)有傾斜的角度,只要重心沒有超出一側(cè)的車輪,就不會(huì)翻到。
作者: 湯圓園 時(shí)間: 2023-12-13 09:04
8 i9 Q6 ?0 K+ i' m
這個(gè)東西說簡(jiǎn)單就是重心不要超出傾覆線(小車為兩輪軸線),說復(fù)雜的話要考慮很多,先考慮能爬多少°角,要考慮前驅(qū)還是后驅(qū),或者全驅(qū),配合考慮轉(zhuǎn)向在前還是后,總之最終計(jì)算就是車重和貨重的的法向力產(chǎn)生的摩擦力大于切向力,知道爬坡角度后,你不就可以建模或者筆算爬坡時(shí)小車重心位置了,不超出傾覆線就好。然后如果轉(zhuǎn)向在前的時(shí)候要考慮前輪留最少10%的法向力作為轉(zhuǎn)向操縱力。最后還要考慮下坡制動(dòng)時(shí)重心變化的情況,這個(gè)時(shí)最危險(xiǎn)的,一般上坡時(shí)小車不會(huì)翻的,能翻的往往是下坡時(shí),特別是下坡制動(dòng)時(shí),制動(dòng)力矩會(huì)成為一個(gè)傾翻力矩,加上這個(gè)力矩后再看看重心有沒有超出傾覆線。
" P$ C8 k$ k& A: M
作者: zhj29 時(shí)間: 2023-12-13 09:53
本帖最后由 zhj29 于 2023-12-13 09:58 編輯
0 r+ d, H- ~# x# p: m( m4 G' o6 |1 D" |7 h* Y$ F) G. D
感謝解答,我的這個(gè)小車就是麥克納姆輪小車,輪子是萬(wàn)向輪,全驅(qū),軸距大概2.3米,輪子直徑大概是400mm左右,這個(gè)小車上部是帶有類似剪刀手的也,能升降的。上方的物體可以默認(rèn)是個(gè)均勻的物體。爬坡的角度大概是50度左右,能麻煩您跟我說一下具體我要怎么計(jì)算嗎,萬(wàn)分感謝6 {- y( @% Y; \
作者: zhj29 時(shí)間: 2023-12-13 10:14
詹姆斯007 發(fā)表于 2023-12-12 20:306 }9 Y* O0 [0 g6 O8 h6 B5 l+ E
需要知道負(fù)載重心高度和小車的輪距,還有小車的高度。9 `. z/ R0 I1 I
起重機(jī)設(shè)計(jì)有一個(gè)穩(wěn)定性計(jì)算的方法。
& {- Y! z% a' ~1 E. {在小車爬坡時(shí) ...
有詳細(xì)的計(jì)算過程嗎,可以分享一下嗎5 j( u; F8 F9 `7 y
作者: 麥哥123 時(shí)間: 2023-12-13 10:44
50°,甭說裝有東西,這車能爬上去都已經(jīng)很屌了/ y3 `7 a/ @# {* f* U% ^) V
作者: 詹姆斯007 時(shí)間: 2023-12-13 20:48
) d* B) Z% ?! T/ P5 ?$ H
你去找《起重機(jī)設(shè)計(jì)手冊(cè)》看看。
; `! u6 i# b" v社區(qū)里應(yīng)該搜得到。
5 E2 s( W8 o- x1 B' _6 i* e
作者: 妖洞兩拐 時(shí)間: 2023-12-14 04:19
|zhj29發(fā)表于 12-13 09:53<i class="pstatus"> 本帖最后由 zhj29 于 2023-12-13 09:58 編輯 </i><br><br>感謝解答,我的這個(gè)小車就是麥克納姆輪小車,輪子是萬(wàn)向輪,全驅(qū),軸距大概2.3米,輪子直徑大概是400mm左右,這個(gè)小車上部是帶有類似剪刀手的也,能升降的。上方的物體可以默認(rèn)是個(gè)均勻的物體。爬坡的角度大概是50度左右,能麻煩您跟我說一下具體我要怎么計(jì)算嗎,萬(wàn)分感謝<br>
作者: lucky5678 時(shí)間: 2023-12-14 08:07
可以用motion做運(yùn)動(dòng)仿真,學(xué)有余力可以學(xué)一下adams
作者: 妖洞兩拐 時(shí)間: 2023-12-14 09:01
樓主可以看看,我做的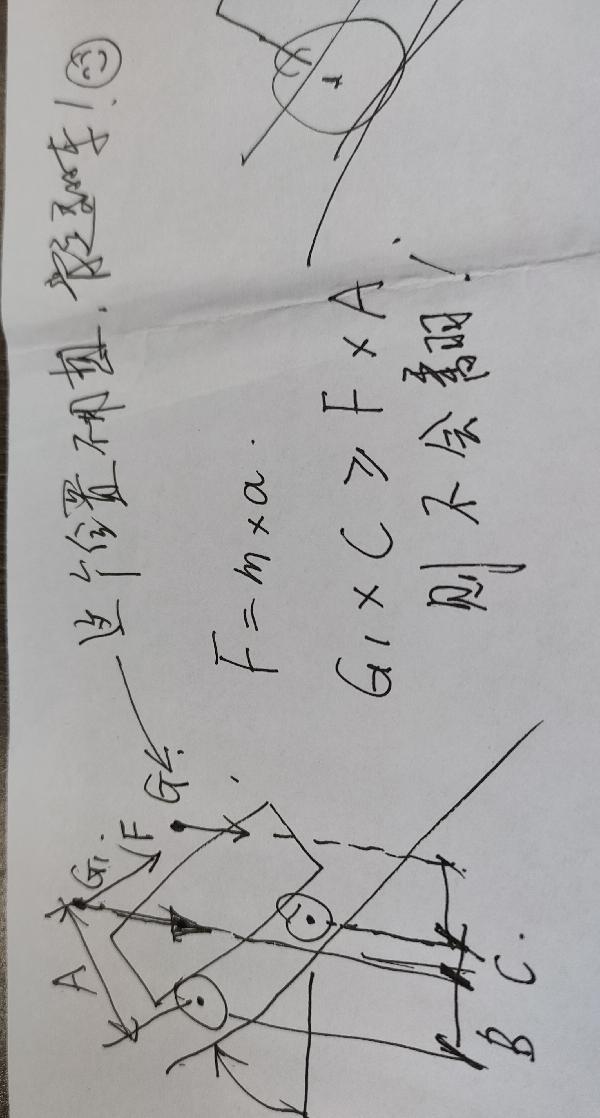
作者: zhj29 時(shí)間: 2023-12-15 09:15
0 O4 E+ Z9 ]3 Q: R% [+ r, s8 _
角度不是我設(shè)定的,是實(shí)驗(yàn)場(chǎng)地有個(gè)這么個(gè)東西,我計(jì)算出來(lái)的50度,然后麥克納姆輪廠家說可以過,我現(xiàn)在是想分析這個(gè)車過這個(gè)坡會(huì)不會(huì)翻車,怎么計(jì)算呢 這個(gè)是那個(gè)要過的坡的截面圖
; U) Y6 ]" q* ?
作者: zhj29 時(shí)間: 2023-12-15 09:17
: R, j9 H: [3 R2 ~! H
好的謝謝
7 J( ~. D) R' q9 Z
作者: zhj29 時(shí)間: 2023-12-15 09:18
" v- B3 X' A# U( v* ?6 ?/ a容易上手不0 B; c( q. n6 N; S7 ~' f
作者: zhj29 時(shí)間: 2023-12-15 09:27
: J/ d% v/ W7 i, r* C$ p
我表述的可能不準(zhǔn)確 這是那個(gè)要過的坎的截面圖,賣小車的廠家說可以過,現(xiàn)在要分析小車過的時(shí)候會(huì)不會(huì)翻車,要怎么計(jì)算呢8 |; X& }+ {! D( b; E- s( t
作者: zhj29 時(shí)間: 2023-12-15 09:29
! j. L& W p1 u! @! J5 P: Y6 I8 M5 l
沒看懂,能給我詳細(xì)的解釋一下嗎 多謝多謝
2 C4 E B% Y2 M; H- V6 p
作者: zhj29 時(shí)間: 2023-12-15 10:09
+ p1 v( O$ J* ]9 n, WCAD怎么分析呢
9 Q* W0 f5 ~) t
作者: zhj29 時(shí)間: 2023-12-15 10:30
6 f/ p' J) p+ n
能詳細(xì)的說一下怎么計(jì)算嗎 謝謝
作者: 妖洞兩拐 時(shí)間: 2023-12-15 13:17
|- `. p7 `- n9 P
小車重心位置你要先知道; p! ^6 M! _' L, h+ M
作者: zhj29 時(shí)間: 2023-12-15 13:47
. Q' ~1 P6 }% N+ c0 ~重心通過軟件能找到,應(yīng)該大差不差- c% ^/ M9 e _4 d7 W: `4 Q6 E0 d
作者: DaedraMech 時(shí)間: 2023-12-19 21:28
“能否傾覆”分析起來(lái)還是很容易的,前面已經(jīng)有老哥說過了,就是考查質(zhì)心所在的豎直線是在支點(diǎn)(轉(zhuǎn)動(dòng)趨勢(shì)的旋轉(zhuǎn)中心,對(duì)于我的圖是滑塊的右下角,對(duì)于你的情況可能是右下方的輪子與斜面接觸點(diǎn))內(nèi)還是支點(diǎn)外,下圖中兩個(gè)滑塊沒有任何區(qū)別,只不過一個(gè)豎著放,一個(gè)橫著放,這便導(dǎo)致了質(zhì)心所在的豎直線分別處于支點(diǎn)內(nèi)、外,你可以看到他們出現(xiàn)了完全不同的運(yùn)動(dòng)趨勢(shì):[attach]556286[/attach]; w" @; K1 T+ `- L6 ]3 G7 W
現(xiàn)在我們拿兩個(gè)滑塊具體做些受力分析:$ y; e6 A. H5 C7 t
對(duì)于上面的滑塊來(lái)說,容易推知
% }" Q3 ^. y. y7 l斜面支持力對(duì)支點(diǎn)P的矩為Mn=GLcos(θ),沿促進(jìn)滑塊傾覆的方向;
# G% p* F6 w8 O6 S重力對(duì)支點(diǎn)P的矩為MG=GLcos(θ+α)/cos(α),沿抑制滑塊傾覆的方向。
9 ~$ F; B! z: C7 I4 ]& `5 a那么滑塊的傾覆力矩M=Mn-MG=-GL·sin(θ)·tan(α),由于θ、α都是銳角,所以M<0,滑塊不會(huì)傾覆。
; E' y. O8 w# F7 g4 o1 p而對(duì)于下面的滑塊來(lái)說,支持力矩和重力矩都是沿促進(jìn)滑塊傾覆的方向,無(wú)須進(jìn)一步計(jì)算,滑塊必然傾覆。
3 S& b1 l' M7 }* v: y! K" [: z[attach]556291[/attach]0 n# V& Q& H9 l( Y) b( h, T
其實(shí)更有工程意義的問題是滑塊“抗傾覆的能力有多大”,畢竟讓滑塊處于剛要傾覆的臨界態(tài)并沒有什么實(shí)用性,可以參照上面的分析過程給上方滑塊再加一個(gè)外力(矩),再次利用力矩平衡,解出的力(矩)即可表征滑塊的抗傾覆能力,就是說這個(gè)滑塊在受到這么大的力(矩)之前,仍然能在斜面上好好待著而不傾覆。
% {! R" t/ e4 W! P, q4 ~" g0 G5 `; e3 K5 h/ ], x
需要額外說明的是上面的討論其實(shí)都是在默認(rèn)斜面摩擦足夠的前提下,如果斜面比較光滑,那么滑塊很可能在有傾覆趨勢(shì)之前就滑落下去了,換句話說,這種情況下小車根本就上不去斜坡,這里我只拋磚引玉,就不展開講了,有興趣可以自己思考下斜面達(dá)到怎樣的光滑程度才會(huì)出現(xiàn)這種現(xiàn)象。
2 \- Q N) C$ i[attach]556294[/attach]: k5 u |- S b8 _! U& U% M
作者: DaedraMech 時(shí)間: 2023-12-19 21:58
另外麥輪還挺嬌貴的,最好能在平地上使用
作者: zhj29 時(shí)間: 2023-12-20 09:43
" U! y' T5 t8 y% ]8 `% O) k; a感謝感謝 我看一下) c# E; j0 p' j5 Z0 l
作者: zhj29 時(shí)間: 2023-12-20 11:30
# l+ B! K" w5 ?6 o/ t% {5 R5 a
冒昧的問一句這種動(dòng)畫是怎么做的 在這方面真是小白 希望指導(dǎo)3 L5 J7 I: Y- v8 o
作者: zhj29 時(shí)間: 2023-12-20 13:52
t. o5 O# ^+ y1 [# L- P8 P7 V% I
有沒有資料發(fā)給我一份 這個(gè)真是小白,一點(diǎn)不會(huì)
! r4 X: G! d, V: ~) a* j5 K
作者: DaedraMech 時(shí)間: 2023-12-20 15:12
8 T) z. e' v; m3 a i0 |# `# c+ X ]仿真源文件:$ p6 I0 m5 o) p. n% z) L7 K; ]
[attach]556325[/attach]
6 _9 ~+ W1 r+ @學(xué)習(xí)的話可以找一本叫《SolidWorks Motion 運(yùn)動(dòng)仿真教程》的書,電子版在網(wǎng)絡(luò)上流傳很廣,B站上也有不少視頻教程
: E9 X9 ?$ k9 O4 `+ \8 z2 c6 g
作者: zhj29 時(shí)間: 2023-12-20 15:13
DaedraMech 發(fā)表于 2023-12-20 15:12 [+ V+ @; w5 q! ~2 ?
仿真源文件:+ U% Q! `9 Q9 Q. f& `, C
6 Y: a) j# h6 g% r, t! @4 g, {& z0 Z3 C
學(xué)習(xí)的話可以找一本叫《SolidWorks Motion 運(yùn)動(dòng)仿真教程》的書,電子版在網(wǎng)絡(luò)上流傳很廣 ...
十分感謝
作者: zhj29 時(shí)間: 2023-12-20 15:15
DaedraMech 發(fā)表于 2023-12-20 15:12
% Z0 p c: j* K* U% l仿真源文件:, v5 ?; l* t8 ~8 r4 S. F/ y; y
' S' Y6 B+ y5 X& c! S0 {
學(xué)習(xí)的話可以找一本叫《SolidWorks Motion 運(yùn)動(dòng)仿真教程》的書,電子版在網(wǎng)絡(luò)上流傳很廣 ...
& t. \% {) g: P& Q: K# }下載了看不了 我的是20版本9 {) W: H# _- U' p
作者: 詹姆斯007 時(shí)間: 2023-12-26 21:17
zhj29 發(fā)表于 2023-12-15 09:15
3 L2 F/ @* i1 K& z" M! ~角度不是我設(shè)定的,是實(shí)驗(yàn)場(chǎng)地有個(gè)這么個(gè)東西,我計(jì)算出來(lái)的50度,然后麥克納姆輪廠家說可以過,我現(xiàn)在是 ...
圖示的上下坡,你的車會(huì)拖底的。% F& ]5 a' i0 W8 ]/ p8 Q
作者: zhj29 時(shí)間: 2023-12-27 09:19
% G7 H/ g% i8 A' V* n2 f
拖不拖底怎么判斷呢- b2 I/ F1 q6 L% D8 N' }1 D& v
作者: 詹姆斯007 時(shí)間: 2023-12-27 21:08
你注意看一下越野車和SUV,車前車后的保險(xiǎn)杠下面,都是傾斜的,這是為了上下坡時(shí)不會(huì)蹭到。
# J# w2 g4 r9 q$ g* C' b你可以畫出車的模型和那個(gè)駝峰路的模型,然后把車放在不同的位置,你就知道前后都會(huì)刮蹭,前輪越過坡頂就會(huì)拖底。
作者: dickych 時(shí)間: 2023-12-28 09:32
簡(jiǎn)單判定,重心投影在支撐面內(nèi)不翻,超出投影面翻
作者: zhj29 時(shí)間: 2024-1-3 09:18
$ K9 [( I5 M7 e$ q: a% p$ t6 {0 q謝謝4 M; n/ g8 }+ S- ^# t3 f
| 歡迎光臨 機(jī)械社區(qū) (http://www.ytsybjq.com/) |
Powered by Discuz! X3.5 |