久久久国产一区二区_国产精品av电影_日韩精品中文字幕一区二区三区_精品一区二区三区免费毛片爱
機械社區(qū)
標題:
收料機構的設計
[打印本頁]
作者:
start_00000000
時間:
2023-10-8 17:07
標題:
收料機構的設計
如題,這個是我面試的一個題目,老板的意思是讓我來設計并給一定的報酬,至于多少,大家可以估計下
3 ~4 ?/ r7 f# l7 w5 m7 D- p
如圖,輸送機1上有3列產品,大小重量材料都差不多,可以看成一種物料,大小為150?100?3,重量幾十克吧,類似于包裝好的一包袋裝眼罩,速度節(jié)拍每分鐘120件。三排就是360.
( }) ]4 `8 l7 `; T; R8 P
要求實現
* H- d! c% H4 `0 G. ^
1.計數收料 比如25件收料
5 F3 g1 Y% {: d' ?$ T5 d* b
2.收料裝入托盤中,并自動送入下一個輸送線上
$ V p. ~# O+ `
3.托盤可以人工,但要求前一個托盤裝滿產品后自動進入下一個輸送線。同時下一個托盤自動進入。
& u/ I, n6 ?6 p1 C
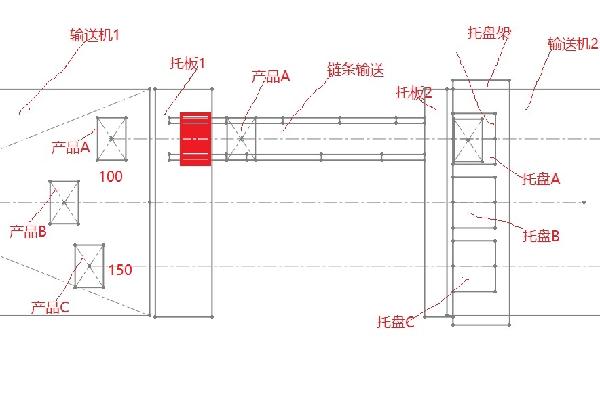
我大概畫了個草圖,大家看下
: a4 @5 z4 b) _; A! n- U
1.輸送機1是來料輸送機,后面有一個拖板。 高度低于輸送機1。 這一步實現收集25個眼罩的功能。
4 ]" Q; I. v; h+ ]: ~$ f
2.鏈條輸送。 鏈條上有擋邊定位。收集25個產品后,鏈條輸送一定距離
9 a) J0 Q6 z! b: T) C% D$ D: t& H
3.鏈條輸送推動25個堆疊好的產品進入拖板2上面,后續(xù)再來25個推動的話,前面25個產品就會被推入后面的托盤里
6 |8 q# i/ M( I$ N5 S1 Z$ ^+ D
4.托盤兩側被氣缸卡住,25個產品到位后,氣缸松開托盤,托盤下降被輸送機2帶走。同時上面的托盤進入位置等待接料。
, P( U9 t8 p. J5 r: O# g2 T
請大家看看此方案如何,或者有更好的方案可以討論下
作者:
小機123
時間:
2023-10-8 17:18
面試考他們沒有做過的方案?還有償???
作者:
東北制造
時間:
2023-10-8 21:04
9 P6 A" C9 o1 {$ y
o(*≧▽≦)ツ:;:感覺就是坑‼️
' _; ]/ ~1 d* c" ` k
% }# s5 X* w/ L T6 o
! J; M( V/ m; z3 Y9 m
作者:
ytzhanggj007
時間:
2023-10-9 06:21
想免費找人幫著討論方案,茶水錢都不用付,打著面試的幌子,白嫖一大堆方案供他們參考,然后確定方案自己做。這就是現在某些小老板的套路。養(yǎng)不起人,還想找人免費出方案,然后自己憑著自己不專業(yè)的繪圖功底自己畫圖或手畫草圖加工出來。這就是他們全套的流程
作者:
ytzhanggj007
時間:
2023-10-9 06:23
這些給你的要求一看就是沒什么邏輯和實際使用效果的要求,最后耗費了你的精力也不會有結果,這就是結局。
作者:
ytzhanggj007
時間:
2023-10-9 06:27
做非標,一定找熟悉人介紹的靠譜客戶。網上找人的大多沒什么經濟實力,也看不起設計的作用,感覺隨便畫畫就行,大都不想花錢,這種你還希望能掙他們的錢?你掰斷他手指也落不下幾個錢
作者:
朱守武
時間:
2023-10-9 08:57
這種東西,抖音上不是很多么
3 b" e$ ]6 o3 X2 J4 ?7 N, g
作者:
SNT
時間:
2023-10-9 09:08
樓主想要交流A,壇友們卻在那扯B...
作者:
SNT
時間:
2023-10-9 09:12
從要求120件/min 速度還是挺快的。要是連續(xù)生產對或許每個環(huán)節(jié)要求都比較高。建議可以在輸送線1上做可切換的雙通道收集,這樣既滿足前道工序高效的收集,也給后道工序攢出12.5s的操作節(jié)拍。
作者:
同創(chuàng)達-葉工
時間:
2023-10-9 09:17
簡單啊,給他一個帶視覺的機械手就完事了
作者:
喂我袋鹽
時間:
2023-10-9 13:34
同創(chuàng)達-葉工 發(fā)表于 2023-10-9 09:17
) e9 n: K( f* \9 D" r1 w! ?3 f
簡單啊,給他一個帶視覺的機械手就完事了
, P V5 [) c$ k1 y5 |! q
先聊預算。再聊報酬。
5 S9 ^3 H3 i% V. J# d
作者:
a19783307
時間:
2023-10-9 15:34
鏈條傳送本如本身是采用一個一個接的話,節(jié)拍時間比較高能。根據提供數據可以明顯看出,單類產品節(jié)拍2個/S。在收集階段采用單個收集的話,會給后面裝盤動作提出很大挑戰(zhàn),危險性較高,就算采用蜘蛛多腳機器人難度也是較大。個人建議收集階段應采用輸送段快速拉開距離,并用光電上下對射檢測數量,后段收集采用固定工裝層疊形式收集,利用輸送帶拉開的距離時間,設計接料裝置實現料品的由上至下的收集25個(25*2=50秒),接連裝置要兩個進行循環(huán)替換,滿倉交由后方的簡易機械手進行裝盤(50S的裝盤時間搓搓有余)。這樣設計應能做到成品最小化,如果采用高速的多腳機器人,成本會較高些,但適用性較強,高速真空破壞加平移擺拍缺失較為簡單。但對于一般企業(yè)投入產出比也提出了很大的挑戰(zhàn)。
歡迎光臨 機械社區(qū) (http://www.ytsybjq.com/)
Powered by Discuz! X3.5
 ! J; M( V/ m; z3 Y9 m
! J; M( V/ m; z3 Y9 m