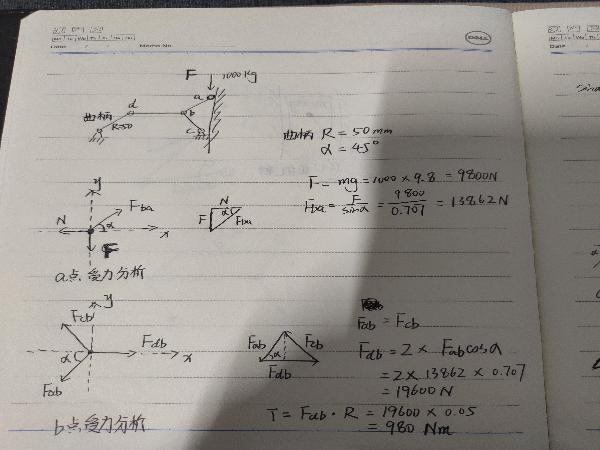
|oldpipe發表于 05-14 08:47圖很漂亮。但你似乎沒有對載荷做完整的描述。計算轉矩的目的是滿足靜載荷的要求,計算功率則是要滿足動載荷的要求。對于連桿機構,即使負載本身是恒定的,轉換到曲柄的力矩也是變化的,需要找到“死點”及對應載荷狀態。換句話說,這樣一個機構的載荷分析需要做對曲柄旋轉360°的每個位置都做到才算完。
|zhongzhixin發表于 05-14 08:44受力分析存在問題,b點應該是分解為正交力系,桿AB不是二力構件;
1071135374 發表于 2022-5-14 09:20
AB桿不是受了三個力嗎?負載的重力,墻壁的支持力,以及AB桿的力
有空的話,麻煩大哥大概畫一個簡圖我參考 ...
zhongzhixin 發表于 2022-5-14 08:44
受力分析存在問題,b點應該是分解為正交力系,桿AB不是二力構件;
yzugwh 發表于 2022-5-14 11:50
基于靜力分析的角度,前面分析都對的,只是最后一步有些問題,力臂不是R,而是Rsinα(如果此時曲柄和ab桿 ...
鯉魚lh 發表于 2022-5-16 16:27
樓上說的不錯感覺靜力學分析是沒有問題的 動力學分析的話 要根據a點的微分方程求二階導數 算出加速度 求 ...
寰宇無人 發表于 2022-5-18 11:22
試了下11#說的計算h的方程,瞬間回到了學生時代
| 歡迎光臨 機械社區 (http://www.ytsybjq.com/) | Powered by Discuz! X3.5 |